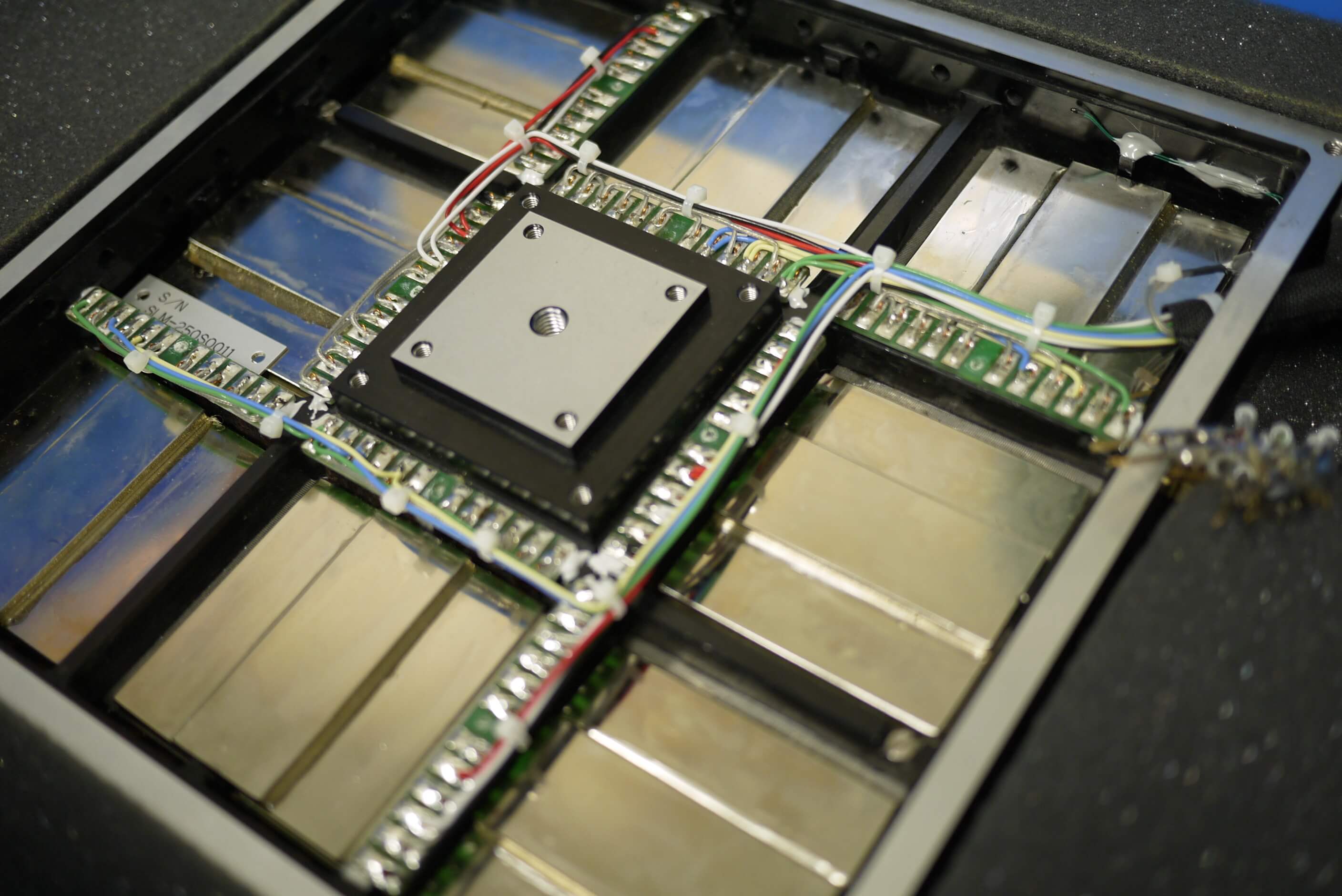
Screen Mask Inspection system
Screen Mask Inspection system
![]()
新電子株式会社
technology solution
![]()
新電子株式会社
technology solution
➀磨耗が無い
モータがプラテン面より浮上している為、磨耗がなくモーター内部でも可動する部分が皆無
➁メンテナンスフリー
接触部分が無いため、長期間メンテナンス不要
➂非常にシンプル
LMガイド等のレールが不要
➃2次元移動
1台のモータで直交2軸分の駆動を行う
➄精度が永久に維持できる
精密加工されたプラテンのみで精度が決まる
➅同一平面上に複数のモータの配置可能
モータ同士は磁気的にも電気的にも他のモータの影響を受けないので、複数モータの配置が可能
➆モータの移動面が上下にこだわらない
➇停止から高速までの広範囲の走行可能
| 項目 | SML-A-160 |
|---|---|
| 方式 | 3相方式 |
| 外形寸法 | 166×166×30㎜ |
| 重量 | 2.2kg |
| エアーギャップ | 0.015mm(エアー圧3kg/cm2) |
| エアー流量 | 20リットル / min(エアー圧3kg/ cm2) |
| 最大積載負荷重量 |
+100kg(プラテン面に押し付ける方向) -100kg(プラテン面より引き離す方向) 注意:5kgを超える場合はご相談下さい。 |
| 最大速度 | 1m / sec |
| 最大加速度 | 1G(負荷2kg時) |
| 最大推力 | 110N |
| 分解能 | 10μm |
| 移動繰り返し精度 | ±2μm |
| 位置精度 | ±50μm以内(300mmに対して) |
| 項目 | SML-A-160 |
|---|---|
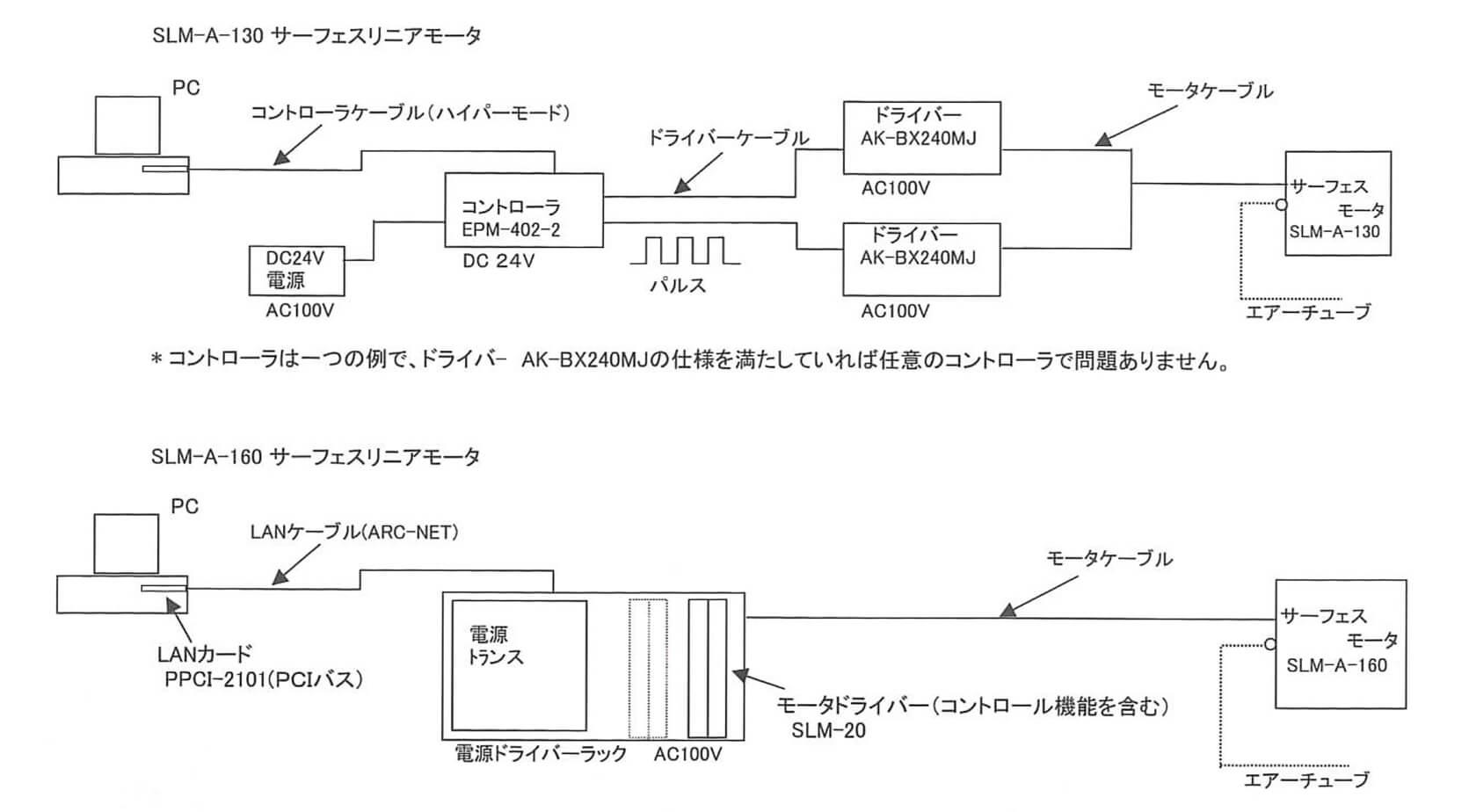
| 入力電源 |
DC+ 5V 1A DC+ 15V 0.5A DC-15V 0.5A DC120V (加減速時) 5A ※ただし当社提供電源を使用の場合はAC100V |
| 入力信号 |
LANによる移動量データー通信 方向信号 X-Y 励磁制御 (X-Y共通) 電流制御 (X-Y共通) |
| 出力信号 | 電流異常信号 |
1
4つのリニアモーターを下向きにセット、各モーターにターゲットとコンタクトをするプローブ(針)とZ軸駆動モーターを装着。各モーターがターゲットの各場所に移動をして検査を行います。4本のプローブがいずれも垂直に近くかつ、同じ角度でターゲットにコンタクトできる為、従来のボールネジ方式では困難だった発想での設計が可能です。
2
特定の場所に設定された条件で接触をして検査をする、またはカメラを移動させて映像を取得する。
3
特定の「物」を取り、特定の場所に装着する。各モーターに機能を分担させることで効率の良い運用が可能。
サーフェイスリニアモーターを採用いただく場合、以下の項目を整理いただくだけでOKです。
➀ワークの稼働範囲に基づき、プラテンのサイズを決める
➁モーターを「上向き」にセットするか「下向き」にセットするか決める
➂モーターの個数を決める
以上で駆動部の基本構想はOKです。後はソフトウェアで各モーターの動作の制御を行うのみ。
※詳しくは弊社へお問い合わせ願います。